1. 斜率限制关闭时,手动斜坡操作 1.1 手动斜坡操作的前提条件
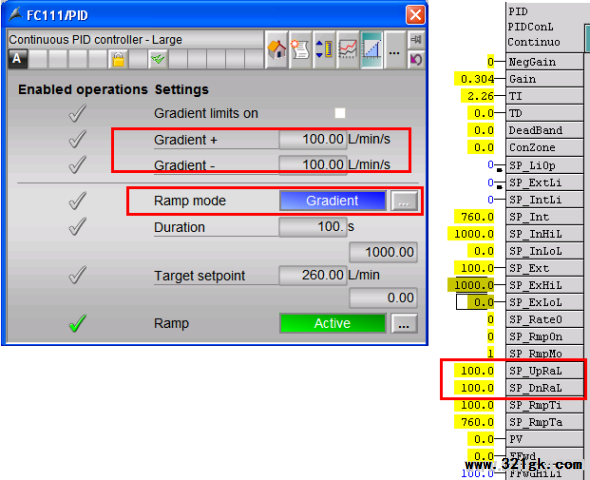
1.2 手动斜坡操作的两种实现方式
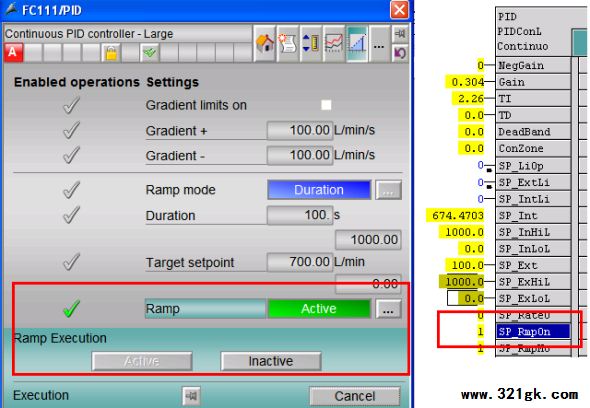
1.3 手动斜坡操作
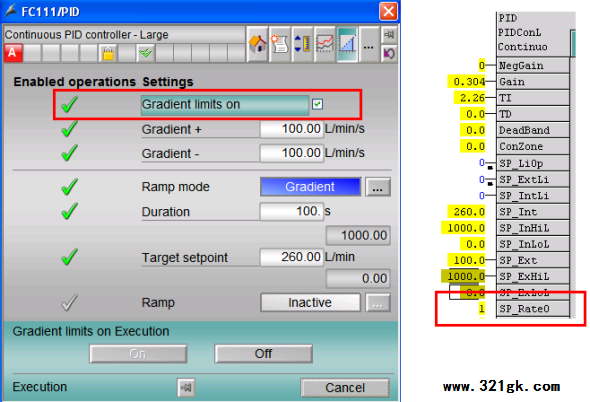
2. 打开斜率限制
图8中设定值无论是内部给定还是外部给定,都会按照Ramp视图中的Gradient +和Gradient – (对应CFC中SP_UpRaLim和SP_DnRaLim) 所设置的斜率增加或减少。
3. 具有Ramp功能的功能块 表1适用Ramp功能的功能块(设定值) 功能块 操作值(MV)给定方式 斜率上下限(Gradient limit on) 操作模式 VlvAnL 内部给定 关闭 手动模式 表 2 适用Ramp功能的功能块(操作值) (责任编辑:admin) |
西门子PCS 7 V7.1 APL库中的斜坡(Ramp)功能
时间:2015-12-25 14:22来源:未知 作者:admin 点击:
次
PCS 7 V7.1 APL库中的斜坡(Ramp)功能




顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>
- 推荐内容
-
- PLC顺序功能图中的一个顺控器的转
怎么从PLC顺序功能图中的一个顺控器的转换到另一个顺控器?...
- 怎样在虚拟机中安装西门子WINCC软件
如何在虚拟机中安装WINCC软件...
- 西门子WINCC7.0与S7-200通过OPC通讯(
西门子WINCC7.0与S7-200系列PLC通过OPC通讯(PPI)...
- WinCC Flexible创建的项目怎样移植到博
西门子WinCC Flexible 2008 SP4创建的项目如何移植到博途软件中...
- 西门子plc S7-200系列和组态软件的通
西门子plc和组态软件的通讯...
- 西门子已存储程序的MMC卡报故障的
已存储程序的MMC卡报故障的原因及解决办法...
- PLC顺序功能图中的一个顺控器的转