从PCS7 V7.1开始,可以优化“PCS 7 Library”和“PCS 7 Advanced Process Library”中的控制器,以及有类似功能的控制器。同样也可以调整步进控制器的马达启动时间。 要求:
说明: 更多信息可以参考对应的readme文件和PCS 7的PID 整定器的在线帮助文件。在文档“PID Control with Gain Scheduling and PID Tuning”中,给出了一个基于PCS 7 APL(高级过程功能库)模块的实际操作例子。 注意:
创建环境: |
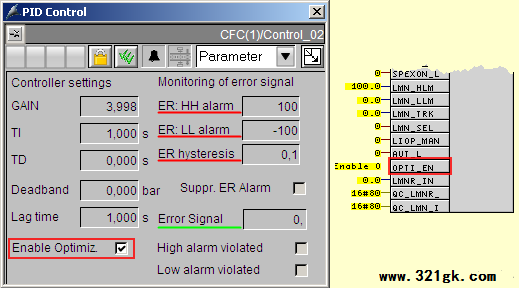
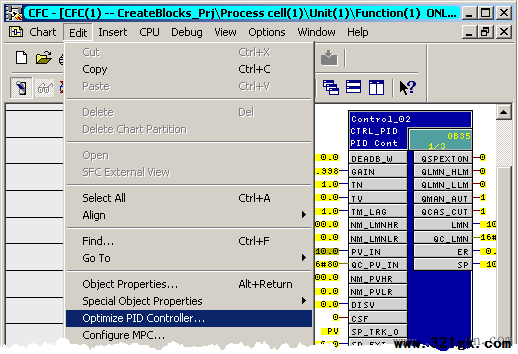
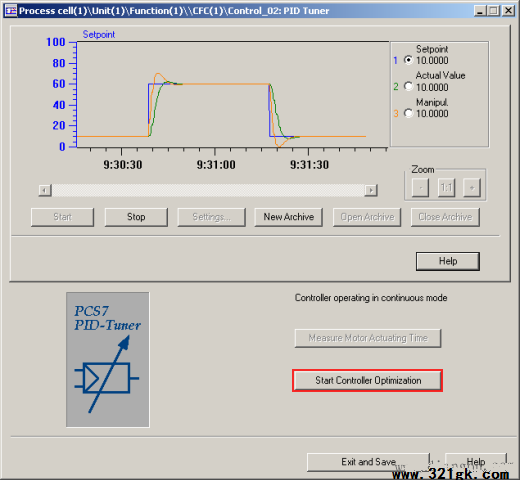
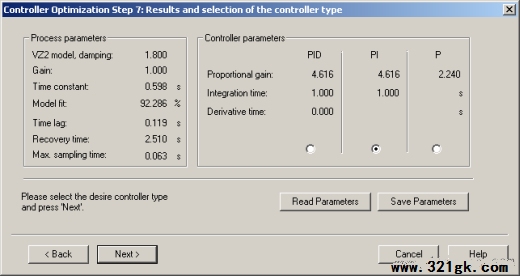
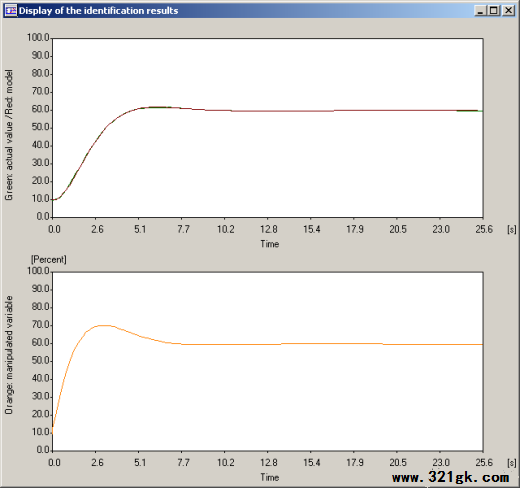
在PCS 7的PID整定器中该怎样实现控制器优化?
时间:2016-01-13 11:06来源:未知 作者:admin 点击:
次
在PCS 7的PID整定器中如何实现控制器优化?



顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>
- 推荐内容
-
- PLC顺序功能图中的一个顺控器的转
怎么从PLC顺序功能图中的一个顺控器的转换到另一个顺控器?...
- 怎样在虚拟机中安装西门子WINCC软件
如何在虚拟机中安装WINCC软件...
- 西门子WINCC7.0与S7-200通过OPC通讯(
西门子WINCC7.0与S7-200系列PLC通过OPC通讯(PPI)...
- WinCC Flexible创建的项目怎样移植到博
西门子WinCC Flexible 2008 SP4创建的项目如何移植到博途软件中...
- 西门子plc S7-200系列和组态软件的通
西门子plc和组态软件的通讯...
- 西门子已存储程序的MMC卡报故障的
已存储程序的MMC卡报故障的原因及解决办法...
- PLC顺序功能图中的一个顺控器的转