伺服电机的刹车抱闸和普通的电磁抱闸原理是一样的,靠电磁线圈产生磁场吸力,克服机械刹车片的弹簧制动力矩,驱动机械刹车片的分开,释放电机轴。
无论是变频器驱动或者是伺服驱动,带抱闸与不带抱闸的区别是:需要在控制回路上增加抱闸控制程序,同时参数还需要设置。
假设变频器是MM系列的,带抱闸需要参数设置及连接:
变频器端子19,20接抱闸线圈,参数 P0731=52.C(抱闸投入)
P1215=1 使能, P1216/7释放/闭合延迟时间 2.5/1 S ,当然通过外部I/O端子控制也可以实现。
伺服带抱闸控制也可以在外部I/O中实现。
一般抱闸的作用是当系统突然断电,或升降移动时需要配置抱闸系统。
伺服电机使用过程中的PID参数整定
伺服电机作为高精度的执行电机,在使用过程中,为达到电机的最优性能,常需要调整其运行PID参数。要进行伺服电机PID控制参数的整定,就需要先大致明白伺服电机的基本原理。
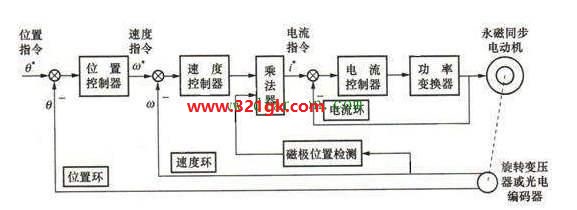
伺服电机基本原理 伺服电机的原理图
以上为伺服电机的控制原理图。其控制过程包含3个控制环,由内到外为电流环、速度环、位置环。由此完成整个伺服电机运行过程的稳定控制。
电机参数整定在使用的过程中,对伺服电机参数整定的过程中,需要调整的是速度环和位置环。一般情况下,电机的电流环是不需要调整的,依照默认参数即可(电流环的调整需要匹配电机的参数指标,对于一个成套的产品,其参数是不变的,故电流环参数不需要调整)。速度环跟随性越好,电机刚性越强;反之,电机运行越柔和。位置环不应出现超调,超调后会表现为电机超过目标位置又返回。
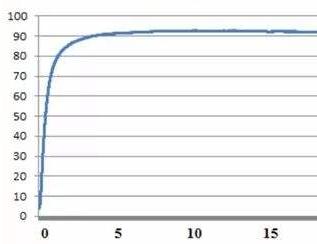
PID运行曲线
1、整定过程
先取消位置控制环(将其参数设置为0)
整定速度环(先加比例参数,超调后再加积分参数)
整定位置环(不应出现超调)
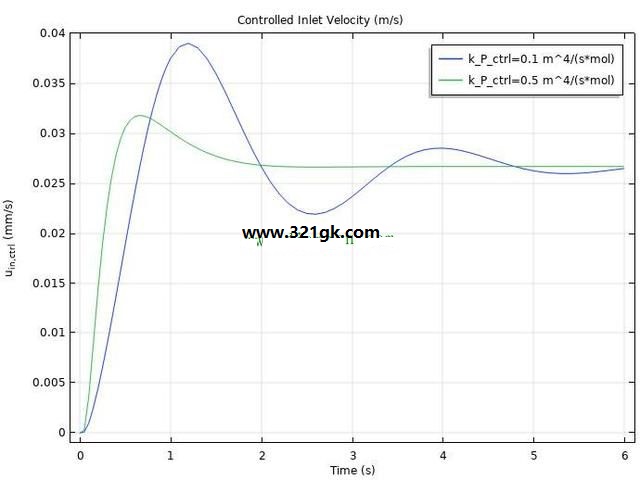
2、速度环
速度环参数的整定,可以调整电机响应速度的快慢。
速度环曲线
在调整的过程中应关注设置速曲线与运行速度曲线的变化,为保证电机的快速响应,其运行过程可以允许一定范围的超调。
在需要快速响应的场景,可以将电机的速度曲线的跟随性调整的强一些,即使运行曲线尽可能地按照设置曲线运行;若运行场景不需要快速响应,则可以将速度曲线的跟随性放开一些,这样电机运行会更加平稳柔和。
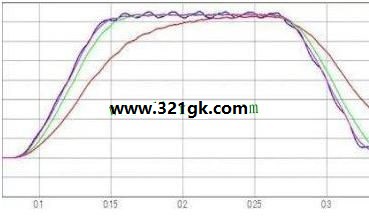
3、位置环
位置环参数的整定,调整电机运行的最终位置的准确性。位置环参数调整的过程中,不应出现超调现象。否则,电机将会出现超过运行定位位置,甚至出现运行震荡的现象。若运行过程中出现此问题,极可能出现安全问题,故应特别注意。
位置环曲线
(责任编辑:admin) |
伺服电机抱闸原理 伺服电机使用过程中的PID参数整定
时间:2020-01-13 20:04来源:未知 作者:admin 点击:
次
伺服电机抱闸原理-伺服电机使用过程中的PID参数整定
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 上一篇:单相电机运行电容与启动电容接法附接线图
- 下一篇:没有了
- 发表评论
-
- 最新评论 进入详细评论页>>