模拟被控对象,关键是用来模拟的工具的传递函数要和实际的被控对象相同。被控对象一般是串联的惯性环节和积分环节的组合。除了用运算放大器来模拟被控对象的传递函数,也可以用plc的程序来模拟。为此我编写了用来模拟被控对象的S7-200的子程序,它也可以用于S7-200 SMART。使用模拟的被控对象的PID闭环示意图如下图所示,虚线右边是被控对象,DISV是系统的扰动输入值。虚线左边是PLC的PID控制程序。 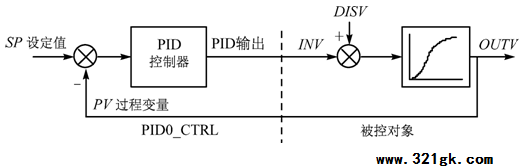 被控对象的数学模型为3个串联的惯性环节,其增益为GAIN,3个惯性环节的时间常数分别为TIM1~TIM3。其传递函数为  分母中的“s”为自动控制理论中拉普拉斯变换的拉普拉斯算子。将某一时间常数设为0,可以减少惯性环节的个数。图中被控对象的输入值INV是PID控制器的输出值。被控对象的输出值OUTV作为PID控制器的过程变量(反馈值)PV。 下图是模拟被控对象的子程序,下图是模拟被控对象的子程序,用与PID的采样周期相同的定时中断时间间隔来调用这个子程序。用与PID的采样周期相同的定时中断时间间隔来调用这个子程序。  下图是用来监视PID回路运行情况的STEP 7-Micro/WIN的PID调节控制面板,可以用它进行PID参数自整定或手动调节PID参数的实验。标有PV的是过程变量(即被控量)的阶跃响应曲线。 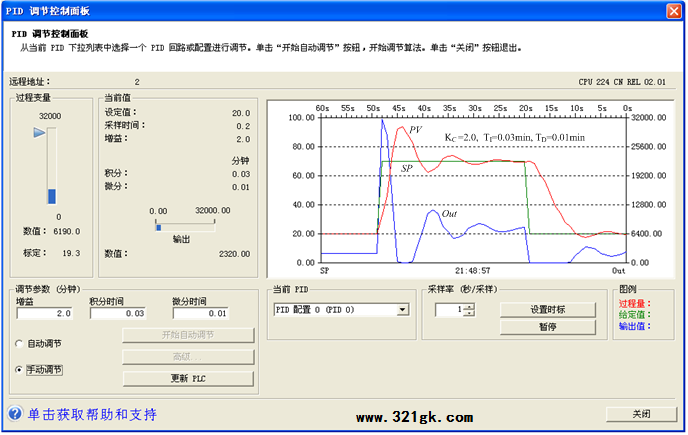 将上图中的积分时间由0.03min(分钟)增大到0.12min,下图的超调量有明显的减小。通过修改PID的参数,观察被控量阶跃响应曲线给出的超调量和调节时间等特征量的变化情况,可以形象直观、快速地学习和掌握PID参数的整定方法。 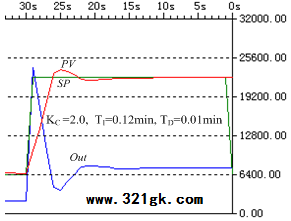 (责任编辑:admin) |
用软件模拟被控对象的S7-200系列闭环控制实验
时间:2016-01-08 11:03来源:未知 作者:admin 点击:
次
用运算放大器模拟被控对象一般需要做印刷电路板,还是比较麻烦。有没有更简单的方法呢? 模拟被控对象,关键是用来模拟的工具的传递函数要和实际的被控对象相同。被控对象一般
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>
- 推荐内容
-
- PLC顺序功能图中的一个顺控器的转
怎么从PLC顺序功能图中的一个顺控器的转换到另一个顺控器?...
- 怎样在虚拟机中安装西门子WINCC软件
如何在虚拟机中安装WINCC软件...
- 西门子WINCC7.0与S7-200通过OPC通讯(
西门子WINCC7.0与S7-200系列PLC通过OPC通讯(PPI)...
- WinCC Flexible创建的项目怎样移植到博
西门子WinCC Flexible 2008 SP4创建的项目如何移植到博途软件中...
- 西门子plc S7-200系列和组态软件的通
西门子plc和组态软件的通讯...
- 西门子已存储程序的MMC卡报故障的
已存储程序的MMC卡报故障的原因及解决办法...
- PLC顺序功能图中的一个顺控器的转